[Case Study] Hướng dẫn đo độ rung kiểm tra lỗi động cơ Motor
Trong thời đại tự động hóa phát triển mạnh mẽ như ngày nay, động cơ điện được xem là một thiết bị không thể thiếu và xuất hiện trong hầu hết mọi nơi từ gia đình đến nhà máy, công trình, cho đến hàng không vũ trụ... Giống như bất kỳ máy móc xoay nào khác, độ rung và tiếng ồn là những vấn đề cần quan tâm trong quá trình sử dụng động cơ điện (motor)
Trong kỹ thuật hiện đại, các máy móc xoay như motor thường được sử dụng để tạo ra chuyển động. Do tính chất làm việc liên tục của nó, máy móc quay sẽ tạo ra rung động. Độ rung động ảnh hưởng đến hoạt động của máy và có thể dẫn đến hỏng máy.
Việc giám sát giá trị độ rung được tạo ra bởi động cơ, biết được nguồn rung lớn đến từ đâu bạn có thể chủ động tìm cách giảm thiểu và cho ra các sản phẩm vận hành êm ái hơn, ít hư hỏng hơn. Góp phần tạo ra các sản phẩm thành công trước đến tay khách hàng
Tại sao cần đo độ rung motor
Ngay cả trong điều kiện hoạt động bình thường, bất kỳ máy móc - động cơ nào cũng tạo ra rung động. Nhiều rung động trong số này xảy ra liên quan đến quá trình vận hành thông thường của máy, chẳng hạn như:
- Quá trình quay của trục động cơ
- Sự ăn khớp của các răng bánh răng
- Điện trường quay .v.v..
Sự cộng hưởng của nhiều sự kiện này có thể dẫn đến các rung động lớn và sẽ tác động mạnh đến động cơ trong quá trình làm việc. Sử dụng phương pháp phân tích tần số là phương pháp chuẩn đoán mạnh mẽ giúp bạn tránh được sự cộng hưởng này
Mục tiêu của bài kiểm tra này bao gồm 02 phần, giúp bạn tránh được các lỗi gây ra do cộng hưởng độ rung của động cơ
- Khảo sát động cơ điện gắn trên một tấm nhựa, nối với đất bằng lò xo. Quan sát độ rung được tạo ra bởi động cơ khi tốc độ quay của nó tăng lên và vượt qua tần số cộng hưởng.
- Xác định ở mức tần số nào là quan trọng nhất đối với hệ thống và xác định các nguồn khuếch đại rung động có thể có.
Có thể bạn quan tâm: |
Lý thuyết giám sát độ rung motor
Để có thể thực hiện bài phân tích hiệu quả, việc chọn một phần mềm đo phù hợp là không thể thiếu để xác định điều kiện vận hành của động cơ xoay, chuyển động tịnh tiến và khi làm việc ở các tốc độ khác nhau
Về cơ bản, sẽ có 02 đại lượng mà bạn cần quan tâm khi thực hiện phép đo này
- Biên độ, cường độ, độ lệch: Là giá trị khoảng cách mà vật thể chuyển động tính từ điểm cân bằng (trang thái ban đầu)
- Tần số: Tốc độ chuyển động của vật thể
Trên các động cơ xoay, các rung động có thể được tạo ra trực tiếp hoặc gián tiếp do sự truyền động từ chuyển động xoay gây ra. Giá trị độ rung có thể trở nên lớn hơn mà không cần khuếch đại từ cộng hưởng. Sự mất cân bằng cơ học, biến dạng, lệch trục, khuyết tật trong vòng bi hoặc khuyết tật răng trên bánh răng có thể gây ra những rung động như vậy.
Mỗi nguồn rung này tạo ra rung động ở một hệ số cụ thể nhân với tốc độ quay của máy. Động cơ xoay có thể tạo ra rung động phụ thuộc vào tốc độ quay ở mức cộng hưởng cấu trúc tự nhiên và tần số riêng. Các vấn đề này thường gây ra độ rung cao - thậm chí có thể gây nguy hiểm cho máy và người sử dụng
Các kỹ sư thường sử dụng sơ đồ hai chiều được gọi là các rãnh thứ tự khi diễn giải các thành phần phụ thuộc vào tốc độ quay khác nhau góp phần tạo ra mức độ rung hoặc âm thanh như thế nào. Từ đó, tính toán các sơ đồ này từ bản đồ RPM và trích xuất thông tin về giá trị RMS của một thành phần để so sánh với giá trị RPM.
Thiết lập phép đo độ rung motor
Lắp đặt thiết bị
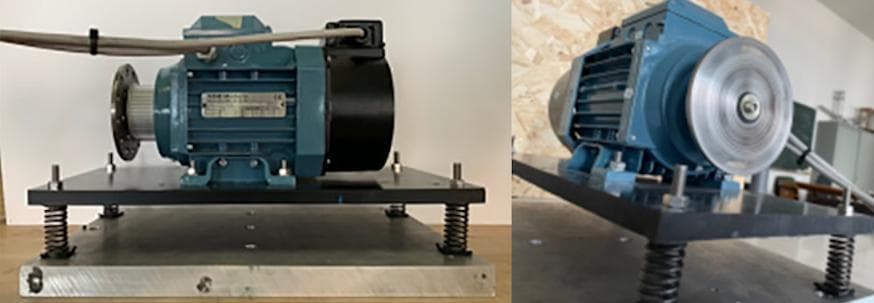
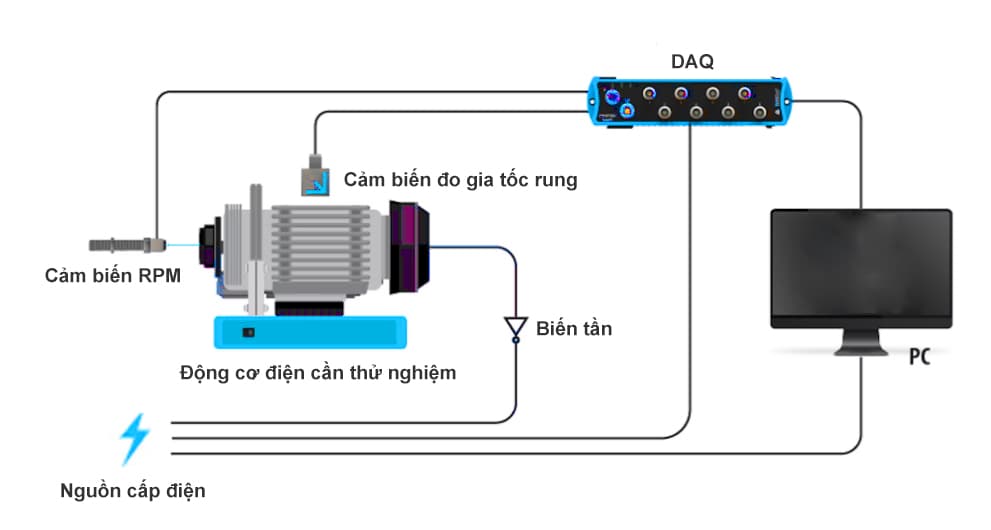
Bước 1: Để có thể thực hiện phép đo, việc đầu tiên bạn cần làm là bố trí hệ thống thí nghiệm. Trong sơ đồ này, thành phần quan trọng nhất chính là động cơ điện ba pha có tốc độ định mức 1410 vòng/phút. Được cấp nguồn bằng điện áp 220V (50 Hz) và được kết nối theo cấu hình delta.
Bước 2: Sử dụng ốc vít và đai ốc, gắn động cơ lên tấm đế nhựa. Bên dưới phần đế, ở bốn góc của tấm nhựa, bốn lò xo cũng được cố định bằng vít và đai ốc. Bên dưới mỗi lò xo, đặt một khối vật liệu chống trượt để tăng ma sát trên bề mặt đỡ. Hình dưới cho thấy hệ thống cuối cùng trước khi thực hiện phép đo.
Bước 3: Kết nối động cơ với một biến tần để chủ động kiểm soát tốc độ xoay của roto, thời gian tăng giảm tốc giúp kiểm tra độ rung toàn diện hơn
Hệ thống thu thập dữ liệu rung
Các rung động được tạo ra do chuyển động xoay của rôto, khi cách xa tần số cộng hưởng, dao động có biên độ rất nhỏ, khó có thể phát hiện bằng mắt thường. Lúc này ta sẽ có biên độ dao động vào khoảng 1/10 milimet trong điều kiện bình thường và 1 milimet ở gần tần số cộng hưởng.
Tín hiệu độ rung phát ra từ motor là tín hiệu tương tự (analog), trong khi máy tính chỉ có thể đọc được các dữ liệu dạng kỹ thuật số (digital) với tín hiệu thời gian và biên độ riêng biệt. Vì lý do này, việc đo lường và giám sát độ rung motor cần có bộ chuyển đổi và bộ khuếch đại tín hiệu.
Để thực hiện phép đo, ta cần có thêm một đầu dò để thu lại tín hiệu vật lý từ motor và chuyển đổi nó thành tín hiệu hiệu tương tự (analog). Sau đó, bộ ADC (Bộ chuyển đổi tương tự sang số A/D) bên trong bộ khuếch đại sẽ chuyển đổi tín hiệu tương tự này thành dữ liệu số để máy tính có thể đọc và xử lý được
Trong số các loại đầu dò được sử dụng cho phép đo độ rung, có lẻ thường gặp nhất chính là gia tốc kế (hay còn gọi là cảm biến gia tốc - cảm biến đo độ rung), đây là thiết bị cho phép chuyển đổi dễ dàng gia tốc thành tín hiệu điện. Trong thí nghiệm này ta sẽ sử dụng gia tốc kế IEPE (Tích hợp Điện tử Piezo-Electric) .
 |  |  |  |
| Cảm biến đo độ rung và nhiệt độ Dynamox TcAs | Cảm biến đo độ rung 3 trục PCB Piezotronics 356A01 5mV/g | Cảm biến gia tốc Dytran 3030B4 1mV/m/s² | Cảm biến đo độ rung MMF Universal Accelerometers |
Đầu ra của cảm biến IEPE là tín hiệu điện áp có trở kháng thấp, trong khi cảm biến áp điện không có thiết bị điện tử tích hợp chỉ có thể tạo ra đầu ra điện tích. Bộ khuếch đại được sử dụng trong cảm biến IEPE có thể là bộ khuếch đại điện áp hoặc bộ khuếch đại điện tích.
- Bộ thu thập dữ liệu rung DAQ: là thiết bị không thể thiếu trong quá trình đo độ rung, thiết bị giúp bạn phân tích các thông số quan trọng thu được từ cảm biến
- Bộ khuếch đại tín hiệu: Tín hiệu đầu ra từ cảm biến thường rất nhỏ, bạn cần bổ sung thêm bộ khuếch đại để gia tăng cường độ tín hiệu trước khi chuyển đổi sang dạng kỹ thuật số
- Điều hòa tín hiệu: sau khi thu được tín hiệu tiếp tục thực hiện các hoạt động khác nhau như lọc, khuếch đại bổ sung và tích hợp thời gian, bộ điều hòa tín hiệu sẽ giúp bạn hoàn thành công đoạn này
- Bộ ghi dữ liệu: đây không phải một thiết bị hoàn toàn cần thiết nhưng lại rất tiện dụng nếu bạn muốn lưu trữ để đối chiếu hoặc báo cáo dữ liệu
- Bộ chuyển đổi Kỹ thuật số/Analog: như đã đề cập ở trên, tín hiệu từ đầu dò là tín hiệu “tương tự” liên tục có dạng sóng tương ứng với đại lượng đo được. Bộ chuyển đổi D/A phát hiện giá trị tức thời của tín hiệu theo các khoảng thời gian đều đặn, chuyển đổi nó thành một tập hợp số rời rạc, tín hiệu số. Bằng cách này, đầu ra bao gồm các số có thể được quản lý và xử lý bởi máy tính
Đo tốc độ vòng quay động cơ
Trong quá trình thực hiện phép đo độ rung motor, bạn có thể sử dụng thêm thiết bị đo tốc độ vòng xoay (loại hồng ngoại) để giám sát thêm các thông số RPM của động cơ..
Trong tình huống này, thí nghiệm đang sử dụng cảm biến đo tốc độ quang học ICP Laser Tachometer. Đây cũng là một cảm biến IEPE, do đó nó có thể được cấp nguồn trực tiếp từ DAQ tương tự như cảm biến đo rung mà không cần nguồn điện bên ngoài.
Cố định cảm biến đo RPM này vào một giá đỡ đã được điều chỉnh, cho phép nó hướng vào một số băng phản chiếu được gắn ở phần bên ngoài rôto của động cơ. Thiết lập này cho phép cảm biến đếm số lần rôto thông qua nguyên lý hoạt động của chùm tia hồng ngoài và tấm giấy.
Từ đó, ta có thể dễ dàng kiểm soát được thông số vòng quay của motor dựa vào cảm biến đo tốc độ vòng quay và biến tần. Dữ liệu đo sẽ được cung cấp về DAQ

Bộ thu thập dữ liệu độ rung DAQ Rula RL-R19
Tiến hành đo độ rung động cơ motor
Kiểm tra đường dốc khi tăng tốc độ
Tiến hành thực hiện phép đo, nên kiểm tra tổng quan xem hệ thống hoạt động như thế nào khi chạy lên với các đường dốc tăng tốc khác nhau. Thực hiện phân tích phản hồi của hệ thống theo ba mức tăng tốc
- 5 giây
- 10 giây
- 20 giây.
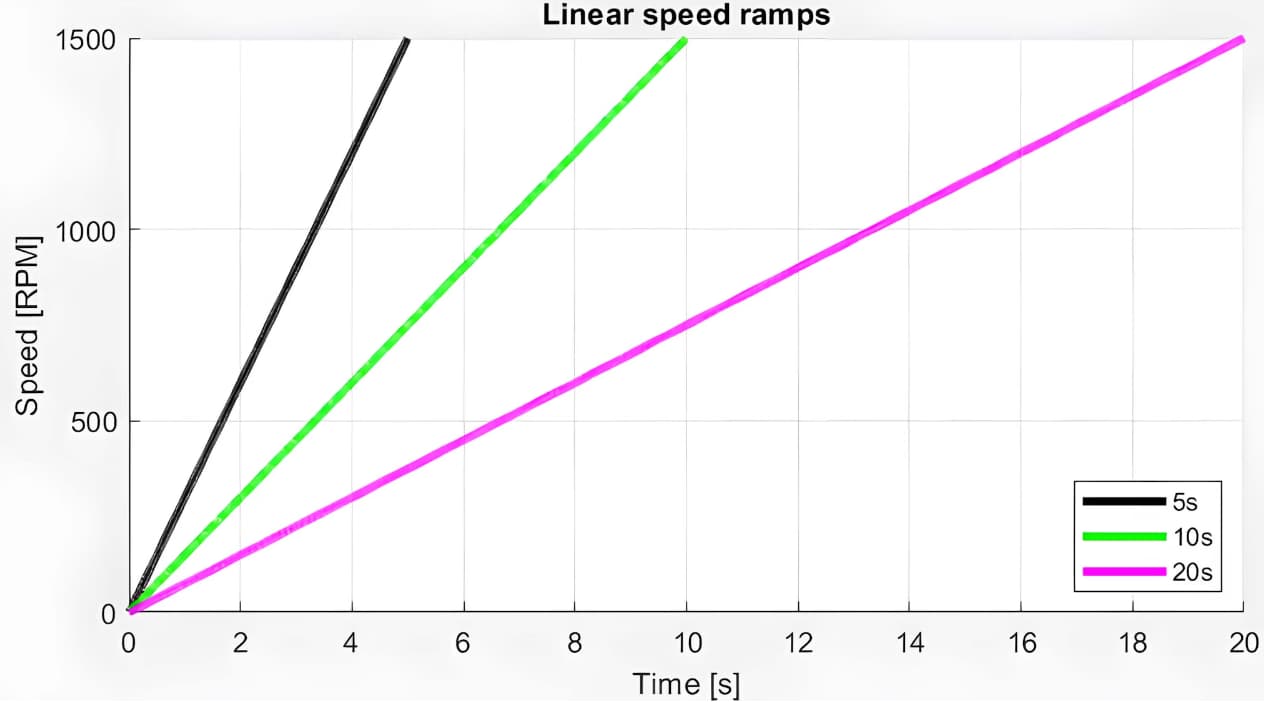
Đường dốc tốc độ của động cơ điện. Sự thay đổi tốc độ có thể thực hiện được nhờ thiết bị biến tần.
Việc giảm hoặc tăng tần số kích thích sẽ làm thay đổi hiện tượng cộng hưởng tức thời xảy ra và các đỉnh mà dao động đạt tới gần nó. Với những đoạn có độ dốc ít hơn, hệ thống có nhiều thời gian hơn để phản ứng với sự kích thích và thể hiện tác động của sự cộng hưởng. Do đó, các đỉnh đạt được của dao động sẽ cao hơn.
Với độ dốc vận tốc cao hơn, hệ thống sẽ gặp khó khăn để theo kịp sự kích thích được áp đặt. Vì kích thích thay đổi nhanh hơn nhiều nên hệ thống vẫn sẽ phản ứng với kích thích từ vài phút trước. Các đỉnh xảy ra sớm hơn so với gia tốc và cường độ thấp hơn
Do ta chủ yếu quan tâm đến dao động theo chiều dọc nên cần đặt cảm biến đo độ rung IEPE một trục ở vị trí gần nhất có thể với trục dọc trung tâm của hệ thống.
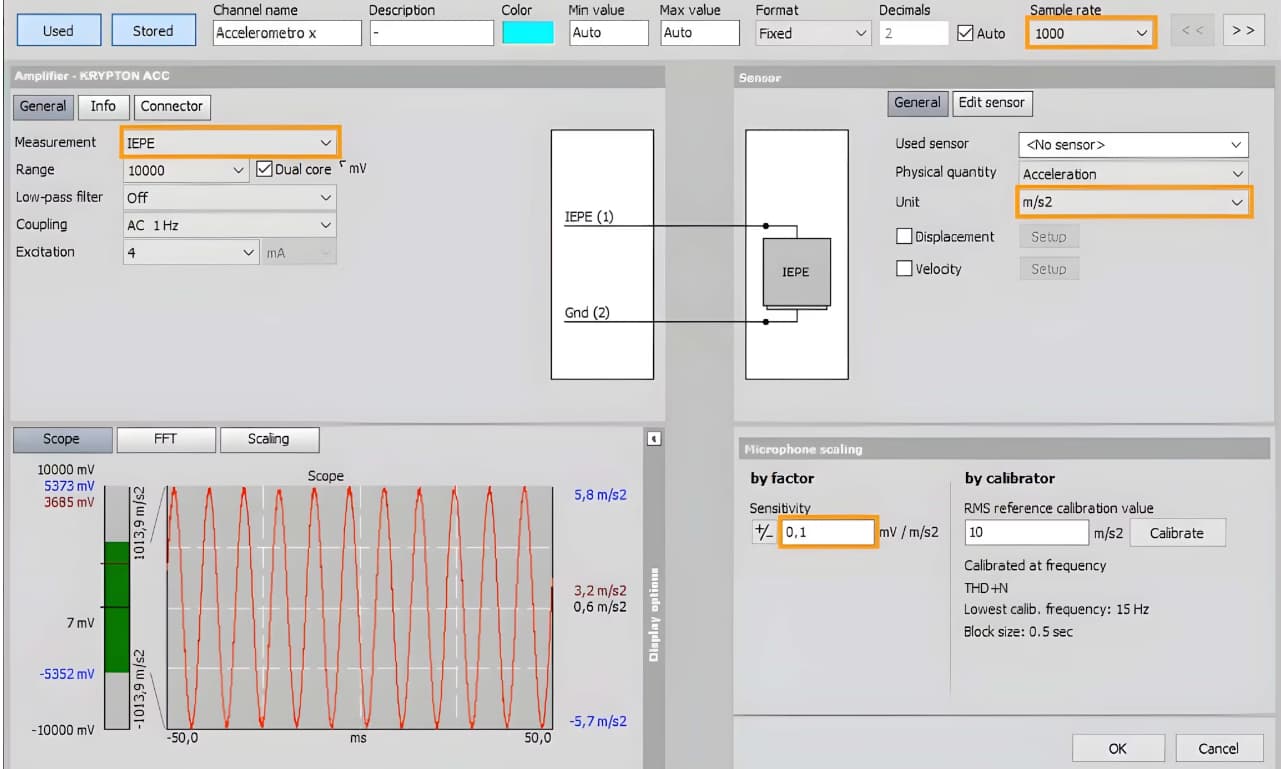
Kết nối cảm biến đo độ rung với hệ thống thu thập dữ liệu DAQ mà bạn đã chuẩn bị. Tiếp theo, thiết lập phần mềm, trong trường hợp này là IEPE và đơn vị đo là m/s2, tần số lấy mẫu là 1 kHz.
Ngoài ra, để phép đo đạt hiệu quả cao hơn, bạn cũng phải đặt hệ số tỷ lệ để hiệu chuẩn. Nhà sản xuất cảm biến sẽ cung cấp giá trị này và liệt kê nó trong data sheet của sản phẩm. Vì vậy, chỉ cần báo cáo giá trị này trong trường độ nhạy là đủ. Đánh dấu các trường được đề cập trong phần mềm,
Với kênh gia tốc kế được thiết lập, bạn có thể thu được dữ liệu cần thiết cho từng đoạn trong số ba đoạn tốc độ. Hình 1 cho thấy hoạt động của hệ thống khi tăng tốc từ 0 vòng/phút lên 1500 vòng/phút trong 5 giây.
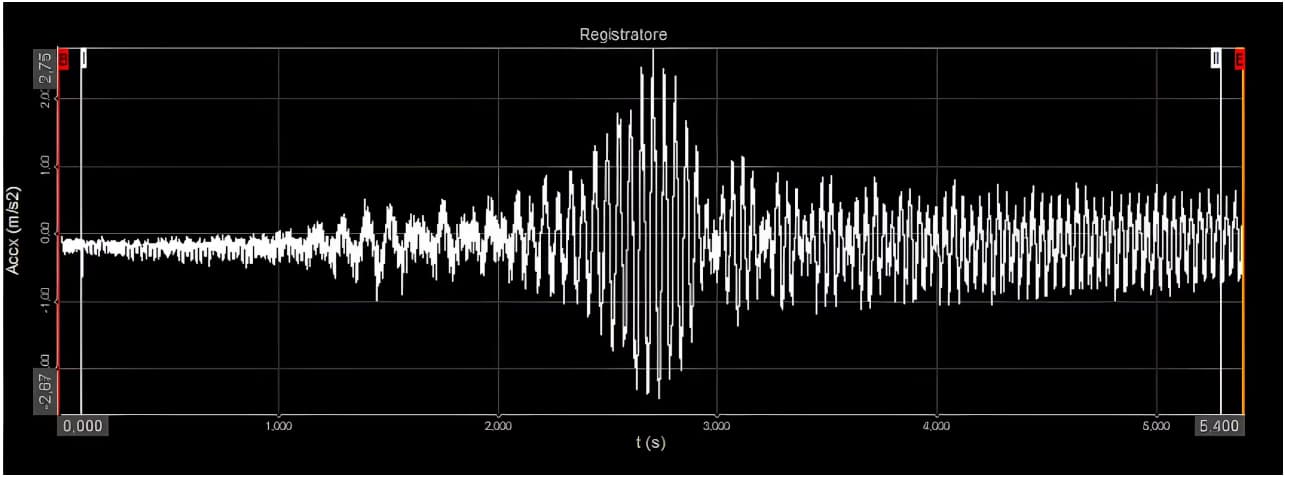
Hình 1:
Các thông số đo ở vị trí góc thẳng đứng so với động cơ dao động là hữu ích nhất và dễ hiểu nhất trong các thông số. Để có được thông số này, bạn cần xử lý tích hợp thời gian gấp đôi khi tăng tốc. Hình 2 cho thấy cách thiết lập tích hợp kép và kết quả mà nó tạo ra.
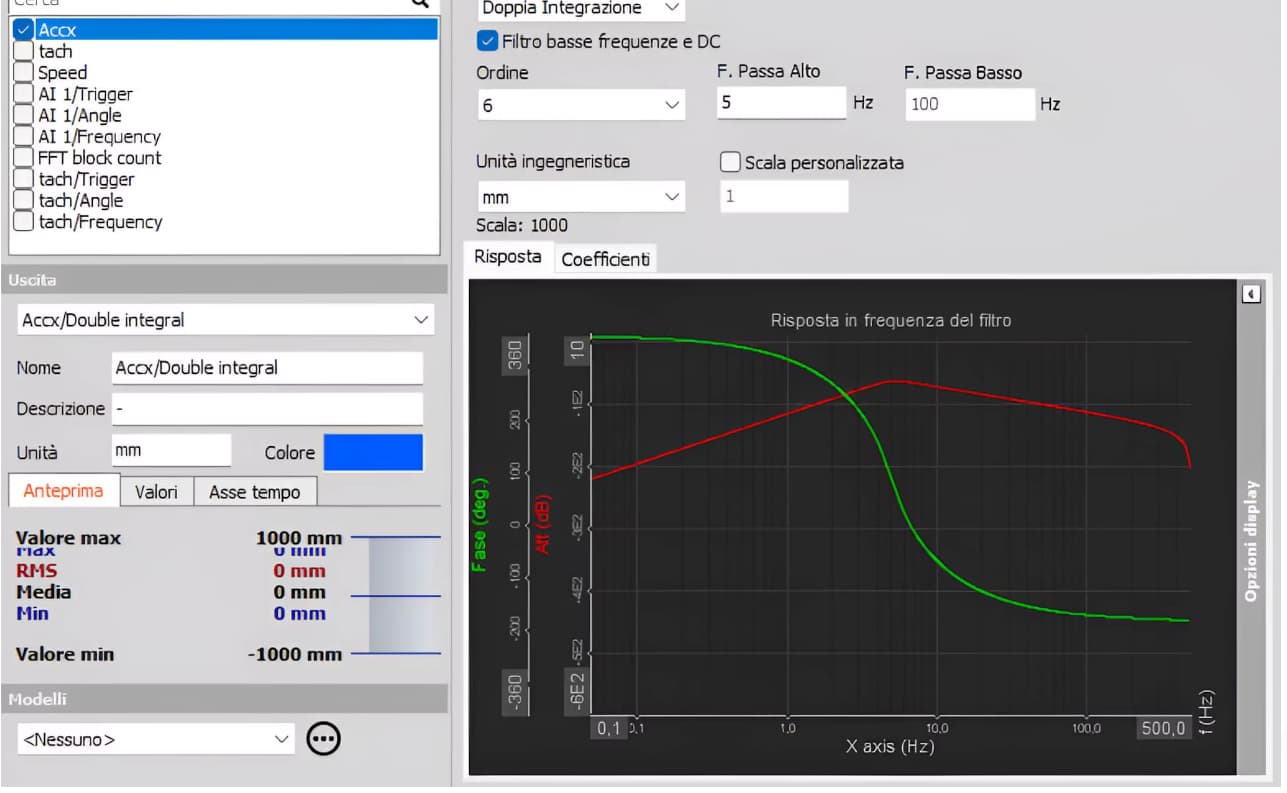
Hình 2: Giao diện thiết lập tích hợp kép
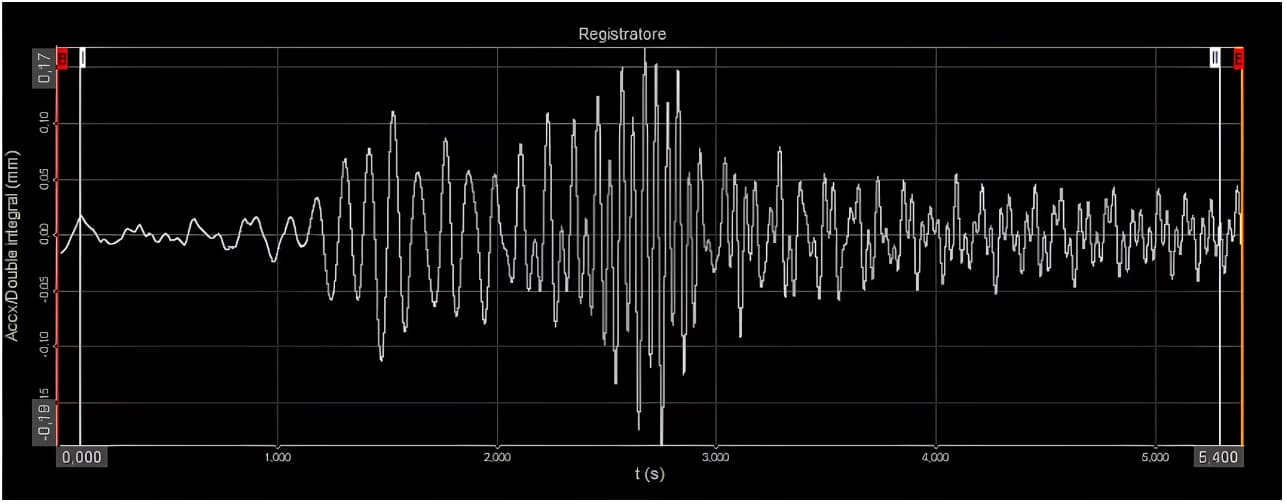
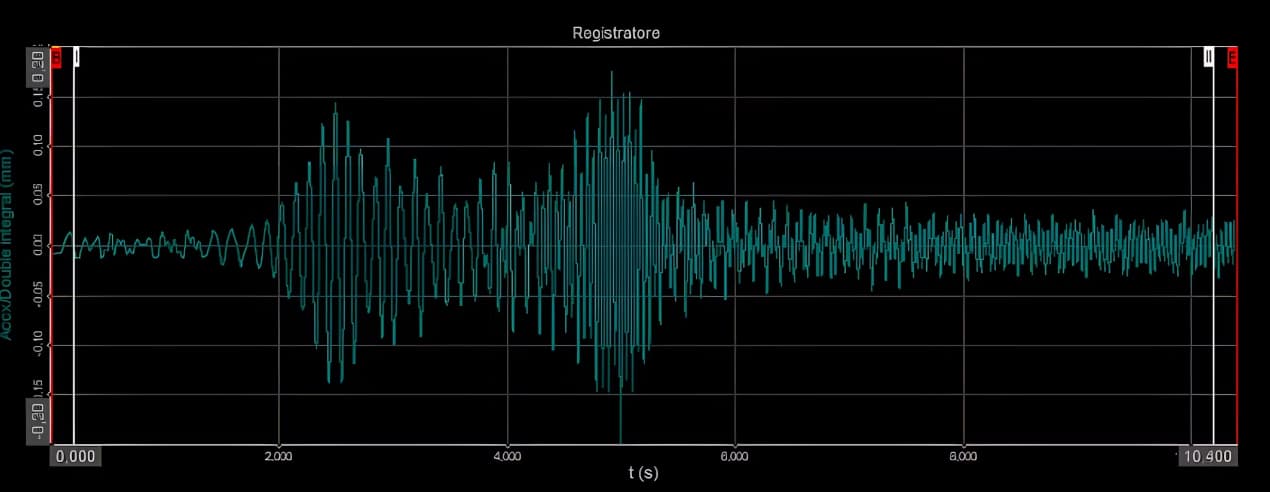
Hình 3: Biên độ dao động của hệ thống đối với đoạn dốc tăng tốc trong 5 giây.
Điều tương tự cũng được thực hiện đối với cả đoạn dốc 10 giây và 20 giây, như trong Hình 4.
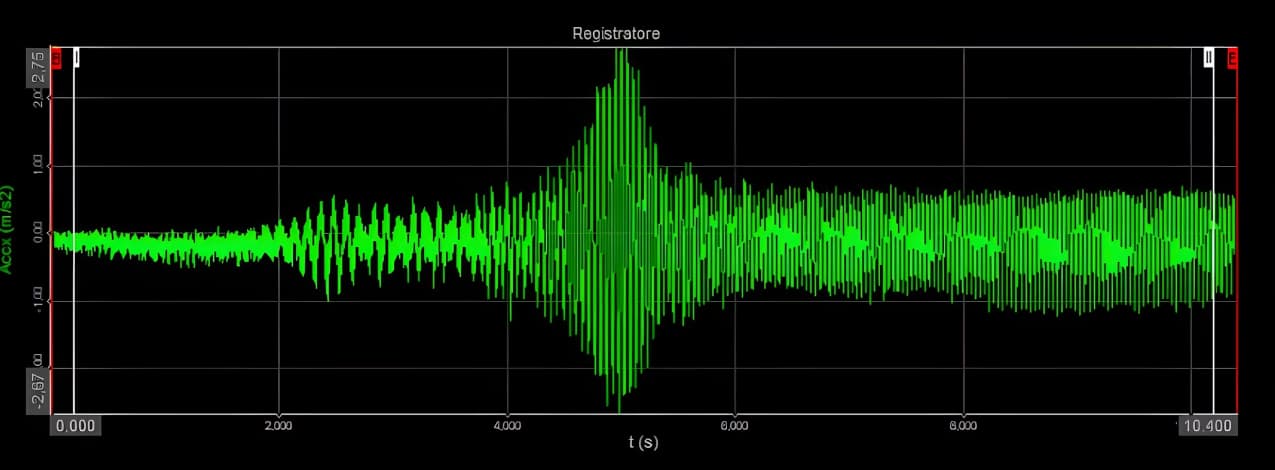
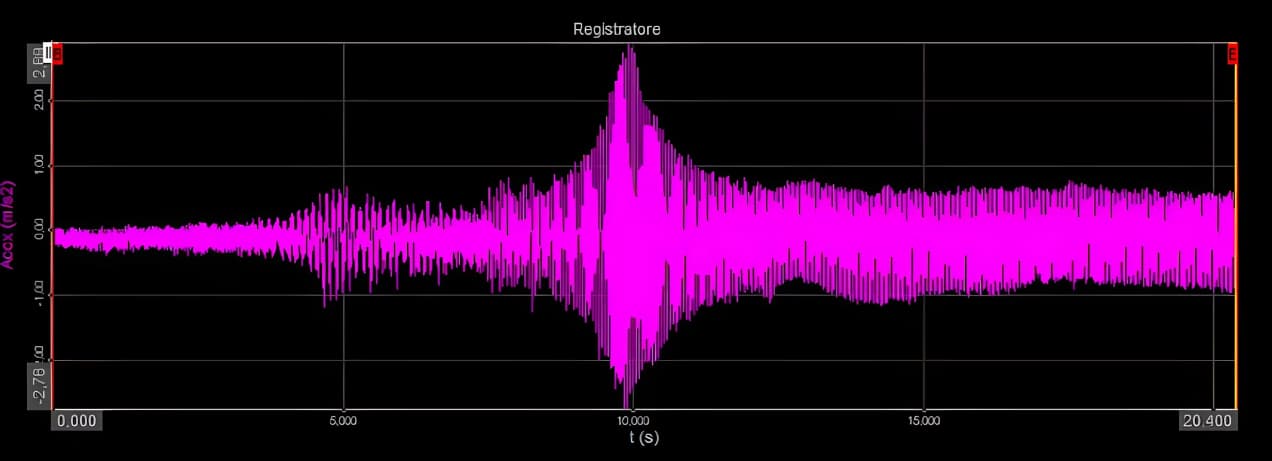
Hình 4. Gia tốc và biên độ dao động của hệ thống trên đoạn dốc 10 giây.
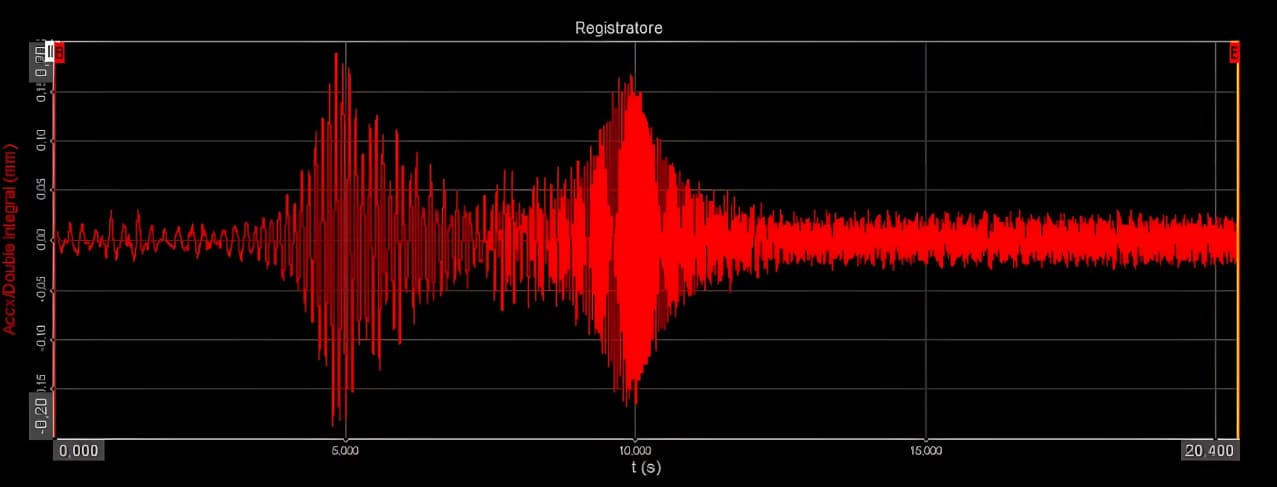
Hình 5. Gia tốc và biên độ dao động của hệ tại đoạn đường dốc 20 giây.
Như có thể thấy rõ từ kết quả thu thập, các rung động trải qua sự khuếch đại ở hai thời điểm tăng tốc riêng biệt. Biên độ dao động của độ rung cho thấy nhìn thấy tác động của hai tần số cộng hưởng dễ dàng hơn nhiều so với gia tốc.
Sau khi thu được khoảng cách xê dịch (biên độ dao động), chuyển từ miền thời gian sang miền tần số. Bạn có thể thực hiện điều này bằng cách sử dụng Bộ biến đổi Fourier (FFT). FFT là một phương pháp toán học để chuyển đổi hàm thời gian thành hàm tần số.
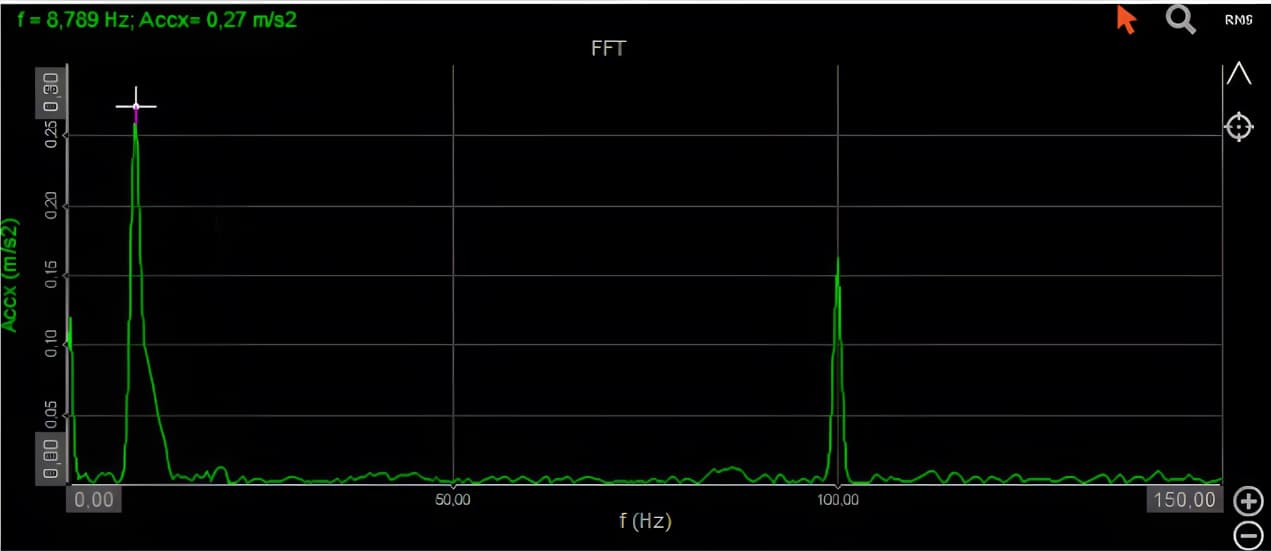
FFT chuyển đổi tín hiệu dạng số thành tín hiệu dạng phổ, cung cấp thông tin về tần số của tín hiệu. FFT sẽ giúp bạn tìm ra tần số cộng hưởng của hệ thống dễ dàng hơn. Hình 6, 7, 8 hiển thị dạng phổ FFT cho ba đường dốc ở độ dịch chuyển cực đại được ghi lại cho tần số cộng hưởng đầu tiên trong số hai tần số cộng hưởng.
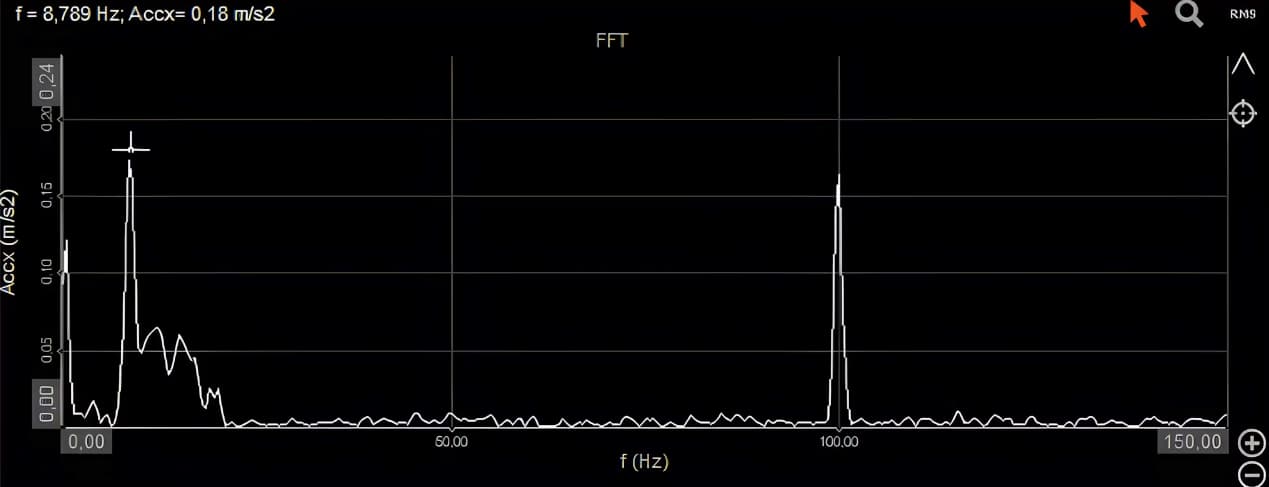
Hình 6: Phổ FFT cho đoạn dốc 5 giây khi tiếp cận tần số cộng hưởng đầu tiên.
Hình 7: Phổ FFT cho đoạn dốc 10 giây khi tiếp cận tần số cộng hưởng đầu tiên.
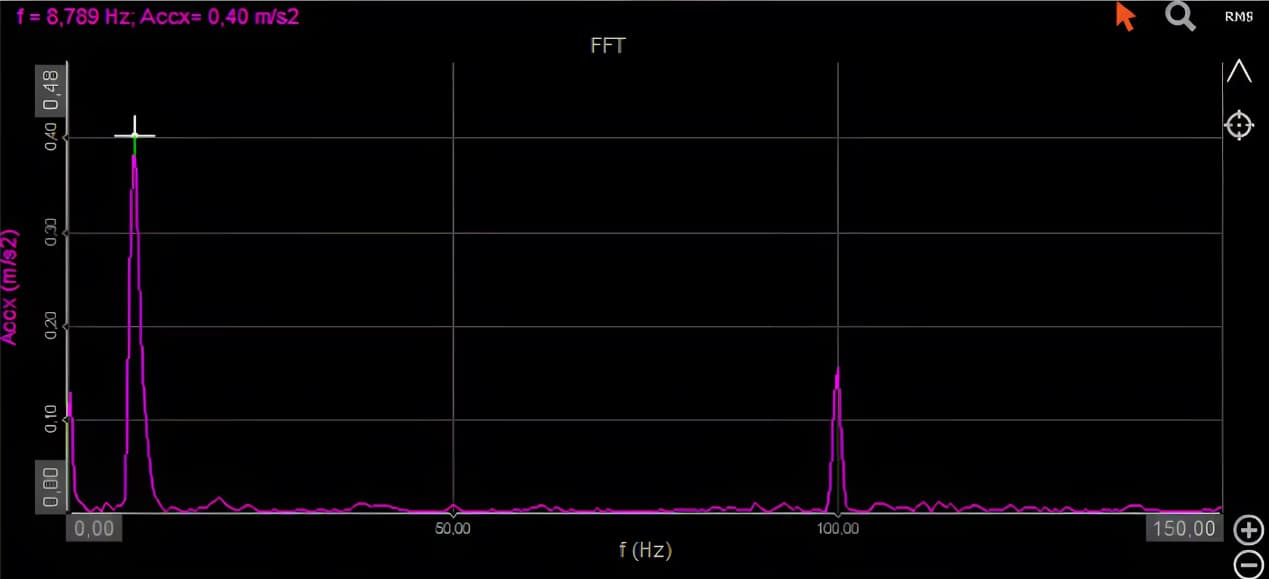
Hình 8: Phổ FFT cho các đoạn dốc 20 giây khi tiếp cận tần số cộng hưởng đầu tiên.
Bảng dưới đây liệt kê các tần số mà độ rung của động cơ có dự khuếch đại đáng kể. Về mặt kỹ thuật, tần số cộng hưởng thứ ba đã xuất hiện, biểu hiện giữa tần số thứ nhất và thứ hai đối với các đường dốc.
Tuy nhiên, tần số thứ ba này tăng cường các dao động theo chiều ngang và không dễ dàng được phát hiện bởi bởi cảm biến gia tốc đo rung nên bạn có thể loại trừ nó. Dao động ngang có thể đo được bằng cách sử dụng đầu dò song song với cạnh ngắn của tấm nhựa, nhỏ so với dao động được phát hiện.
Tần số đầu tiên là tần số 'nảy'. Tần số thứ hai và thứ ba là tần số 'nghiêng' dọc theo hai trục chính.
| Đường dốc | Tần số cộng hưởng đầu tiên HZ/RPM | Tần số cộng hưởng thứ 2 HZ/RPM |
| 5 giây | 8.789 / 527.34 | 19.531 / 1171.86 |
| 10 giây | 8.789 / 527.34 | 19.043 / 1142.58 |
| 20 giây | 8.789 / 527.34 | 19.043 / 1142.58 |
Phân tích độ rung thông qua biểu đồ thác
Sau khi phân tích các dao động dọc, tiếp tục thực hiện phân tích theo dõi thứ tự trên động cơ bằng phần mềm phân tích. Phân tích này sẽ xác định xem có bất kỳ sự mất cân bằng nào của rôto hoặc trục trặc hệ thống khác hay không và chỉ ra yếu tố nào góp phần lớn vào việc khuếch đại rung động trong quá trình động cơ hoạt động
Như đã đề cập trước đó, các sự cố gặp phải trong động cơ motor có liên quan chặt chẽ đến trình tự xảy ra các sự cố này.
Hiện tượng bậc 1x Hiện tượng trật tự trong máy quay biểu thị sự mất cân bằng dư, luôn tồn tại trong động cơ thực.
Hiện tượng bậc 2x biểu thị sự sai lệch giữa người điều khiển và máy vận hành.
Thí nghiệm đơn giản này giúp bạn khẳng định rằng sự mất cân bằng bên trong là nguyên nhân chính gây ra rung động của động cơ
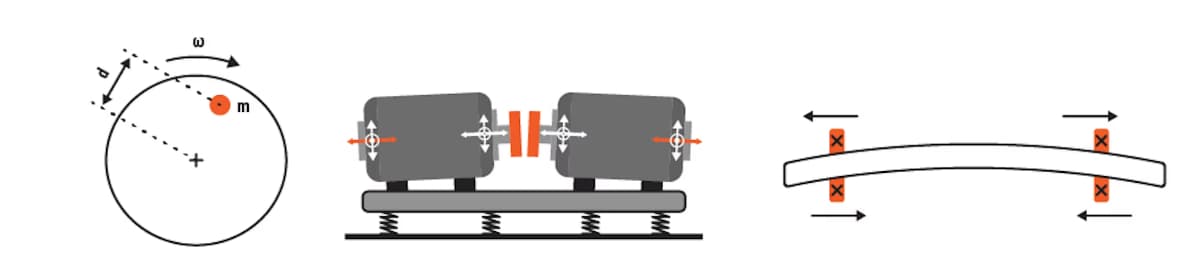
Hình 9: Rung động trục - mất cân bằng khi quay, lệch trục và uốn trục động cơ là những vấn đề chính biểu hiện chủ yếu ở bậc 1x.
Mặc dù phần mềm đo độ rung thường cung cấp nhiều tính năng khác nhau nhưng một phép đo đơn giản như thế này có thể được thực hiện trong thời gian rất ngắn. Bước đầu tiên, bạn cần thiết lập cảm biến đọc tốc độ rôto.
Sau đó, sử dụng mô-đun theo dõi chuyển động của phần mềm. Đặt các tham số để phân tích
Thực hiện phép đo trong thời gian hai phút và bắt đầu phân tích 16 kết quả đo đầu tiên thu được. Trường hợp này, bạn chỉ đưa tám phép đo đầu tiên vào kết quả vì chúng đại diện cho những kết quả quan trọng nhất. Hình 15 thể hiện kết quả thu được từ phân tích theo thứ tự
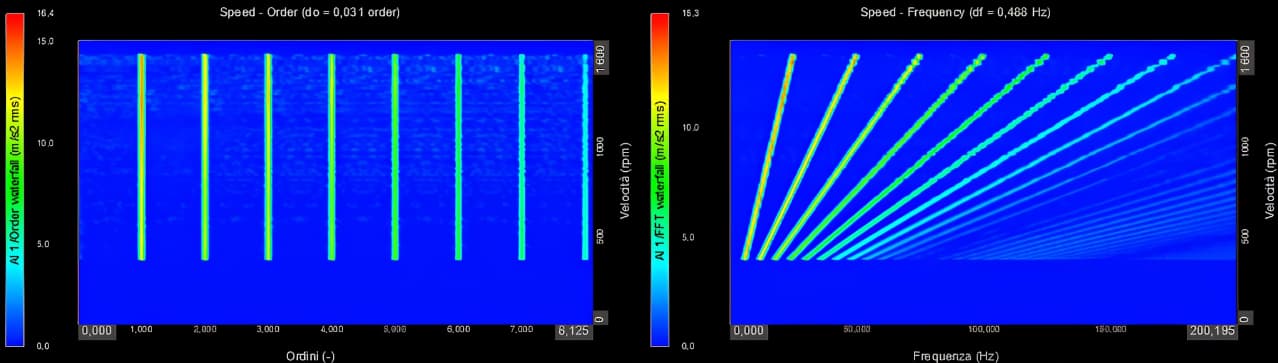
Hình 10. Biểu đồ thác nước để phân tích thứ tự. Cả hai sơ đồ đều có RPM trên trục y và thang màu hiển thị biên độ hiện tượng. Hình bên trái hiển thị số lượng đơn đặt hàng trên trục x, trong khi hình bên phải hiển thị tần số trên trục x.
Các biểu đồ thu được trong Hình 10 đã xác nhận kỳ vọng của về bậc I có cường độ cao nhất so với tất cả các bậc khác. Đó là một hệ thống trong đời thực và các Lệnh khác thể hiện sự lỏng lẻo, khoảng trống và sai lệch được biểu thị bằng cường độ tương đối cao của các bậc II và bậc III
Kết luận
Qua thí nghiệm này, có thể trả lời được cho 2 câu hỏi được đặt ra từ ban đầu
- Điều gì gây ra sự rung động của hệ thống động cơ?
- Điều gì có thể xảy ra với hệ thống khi động cơ chạy ở tốc độ tối đa?
Phân tích hệ thống đơn giản này không chỉ cho phép bạn xác định nguyên nhân chính dẫn đến khuếch đại rung động trong động cơ điện. Bạn cũng sẽ quan sát thấy những tác động xảy ra khi động cơ hoạt động đi qua tần số cộng hưởng.
Rung động đạt mức cao ở tần số cộng hưởng có thể gây hại cho hệ thống và thậm chí gây hư hỏng cho động cơ. Biết được nguyên nhân từ tần số cộng hưởng là điều cơ bản để tránh hoạt động gần những điều kiện này nhưng cũng cho phép các nhà thiết kế cải thiện thiết kế ban đầu thông qua những thay đổi và sửa đổi.
Mua thiết bị đo độ rung ở đâu
Để được tư vấn các giải pháp đo độ rung cũng như mua được các thiết bị chất lượng đến từ các thương hiệu hàng đầu thế giới. Bạn có thể liên hệ cho Lidinco, chúng tôi có kinh nghiệm hơn 10 năm trong lĩnh vực cung cấp các thiết bị, máy đo độ rung, độ ồn
Với độ ngũ kỹ thuật có nhiều kinh nghiệm, cũng như sự hỗ trợ từ các đơn vị sản xuất thiết bị. Chúng tôi cam kết mang đến các thiết bị đáp ứng tốt yêu cầu với mức giá phù hợp nhất
Thông tin liên hệ mua hàng
CÔNG TY TNHH ĐẦU TƯ PHÁT TRIỂN CUỘC SỐNG
Trụ sở chính: 487 Cộng Hòa, Phường Tân Bình, TP. HCM
Điện thoại: 028 3977 8269 / 028 3601 6797
Email: [email protected]
VP Bắc Ninh: 184 Bình Than, Phường Võ Cường, Bắc Ninh
Điện thoại: 0222 7300 180
Email: [email protected]
Hotline: 0906.988.447
Tin cùng danh mục
![[Dự án] Đo âm học, tiếng vang phòng học](https://lidinco.com/storage/posts/du-an-do-am-hoc-phong-hoc.jpg)




