Bộ thực tập điều khiển DC
- Vui lòng liên hệ để kiểm tra tình trạng kho
- Tạm thời chưa có khuyến mãi cho sản phẩm này
Hotline: 0906.988.447
Liên hệ: Hồ Chí Minh
- Điện thoại: (028).3977.8269
- Email: sales@lidinco.com
- Địa chỉ: 487 Cộng Hòa, Phường 15, Quận Tân Bình, TP. HCM
Liên hệ: Bắc Ninh, Hà Nội
- Điện thoại: (0222).730.0180
- Email: bn@lidinco.com
- Địa chỉ: 184 Bình Than, Phường Võ Cường, TP. Bắc Ninh
-
 Tư vấn kĩ thuật
Miễn phí
Tư vấn kĩ thuật
Miễn phí
-
 Miễn phí vận chuyển
Đơn hàng trên 3 triệu
Miễn phí vận chuyển
Đơn hàng trên 3 triệu
Dữ liệu đang được cập nhật
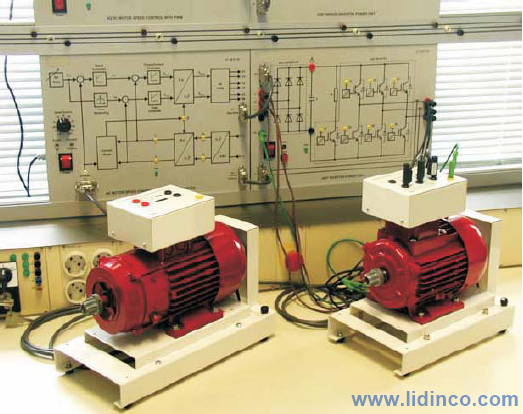
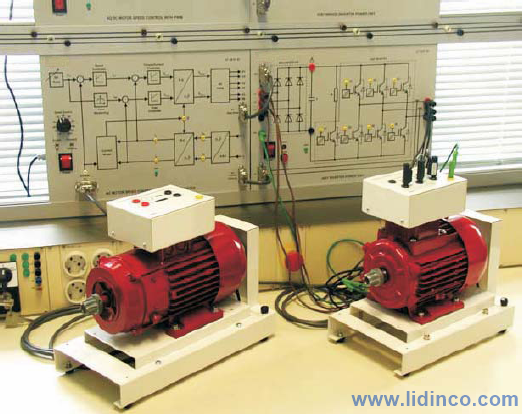
Giới thiệu Bộ thực tập điều khiển DC
Khối điều khiển
Bộ điều khiển tốc độ động cơ DC dùng PWM EM-24-02-01
1. Có thể lựa chọn chế độ hoạt động ¼ vòng, ½ vòng hoặc 1 vòng
2. Điều chỉnh tốc độ bằng cách cài đặt bên trong
2.1 Tín hiệu analog 0-10V, trong chế độ ¼ vòng, ½ vòng (thuận)
2.2 Tín hiệu analog -10V~0V~+10V, trong chế độ 1 vòng (thuận hoặc nghịch)
3. Có thể kết nối máy phát hàm: thời gian tích hợp t = 0.1-100s, 4 phạm vi lựa chọn.
4. Bộ so sánh: giá trị âm hoặc dương.
5. Điều chỉnh tham số của khối điều khiển PI để điều khiển dòng lặp
- Kp = 0.1 ….
- Ti = 5 … 500ms
6. Dòng điện giới hạn 1 – 125% chỉ số tối đa
7. Điều chỉnh tham số khối PI để điều khiển dòng lặp
- Kp = 1 … 48
- Ti = 2 lựa chọn phạm vi 0.5 …. 5ms và 5 …. 50ms
8. Máy phát PWM có thể tạo tín hiệu âm hoặc dương
9. Tốc độ của động cơ được quy thành 1024 bit rồi chuyển đổi thành điện ±10V và điều chỉnh tăng 0.1 – 1
10. Bộ phận bù TR cho động cơ sẽ được kết nối trong trường hợp vòng hở, như vậy tốc độ cẽ thay đổi từ không tải thành có tải
- Điều chỉnh tăng 0.8 – 2 cho tổn hao đồng
11. Cảm biến hiệu ứng Hall sẽ phát hiện dòng hồi tiếp và chuyển đổi thành điện áp ±10V điều chỉnh tăng 0.5 – 1
12. 4 LED 7 đoạn sẽ hiển thị giá trị tốc độ
Khối công suất
Khối nghịch lưu cầu công suất IGBT EM-24-02-02
1. Dòng gate của động cơ được điều khiển bằng mạch chỉnh lưu cầu
2. Chỉnh lưu cầu toàn phần một pha
3. Có thể đo được dòng gate của động cơ
4. Có bộ phát hiện dòng để điều khiển
5. Có thể đo được buss DC
Thí nghiệm tiêu biểu
1. Điều khiển ¼ vòng mạch hở
2. Điều khiển ½ vòng hở mạch
3. Điều khiển 4/4 vòng hở mạch
4. Điều khiển ¼, ½, 4/4 vòng hở mạch bù IR
5. Bộ điều khiển tần số quay PI 1/4
6. Bộ điều khiển tần số quay PI 2/4
7. Bộ điều khiển tần số quay PI 4/4
8. Bộ điều khiển tần số quay PI 1/4 với bộ điều khiển dòng PI
9. Bộ điều khiển tần số quay PI 2/4 với bộ điều khiển dòng PI
10. Bộ điều khiển tần số quay PI 4/4 với bộ điều khiển dòng PI
Động cơ DC chống va chạm EM-30-01-01
o Công suất bình thường : 370KW
o Điện áp bình thường : 200 V
o Dòng điện bình thường : 3.5 A
o Tốc đọ bình thường : 1750 rpm
o Điện áp kích : 200V
o Dòng kích : 0.2A
o Kết nối : 4mm
ELECTROMAGNETIC BREAK EM-30-06-09
sử dụng tải theo nguyên lý dòng điện Eddy để kiểm tra đặc tính máy điện, thích hợp để kiểm tra động cơ, kiểm tra ngõ ra của động cơ khi đang gắn tải tùy chọn.
o Công suất : 370W
o Điện áp : 0~110VDC
o Dòng điện : 0.6A
o Tốc độ : 1750 rpm
o Kết nối : 4mm
o Đế : có khóa gắn các bộ phận rời
Phụ kiện
1. Dây nối 4mm
2. Hướng dẫn sử dụng
3. Hướng dẫn thí nghiệm
Phụ kiện
1. Dây nối 4mm
2. Hướng dẫn sử dụng
3. Hướng dẫn thí nghiệm













-
Dải đo dòng điện:
-
Dải đo điện áp:
-
Chữ số hiển thị:
-
Độ chính xác:
Đồng hồ vạn năng GW Instek GDM-9060





Vui lòng đăng nhập để viết đánh giá!